
‹
›
‹
›
Делиться:
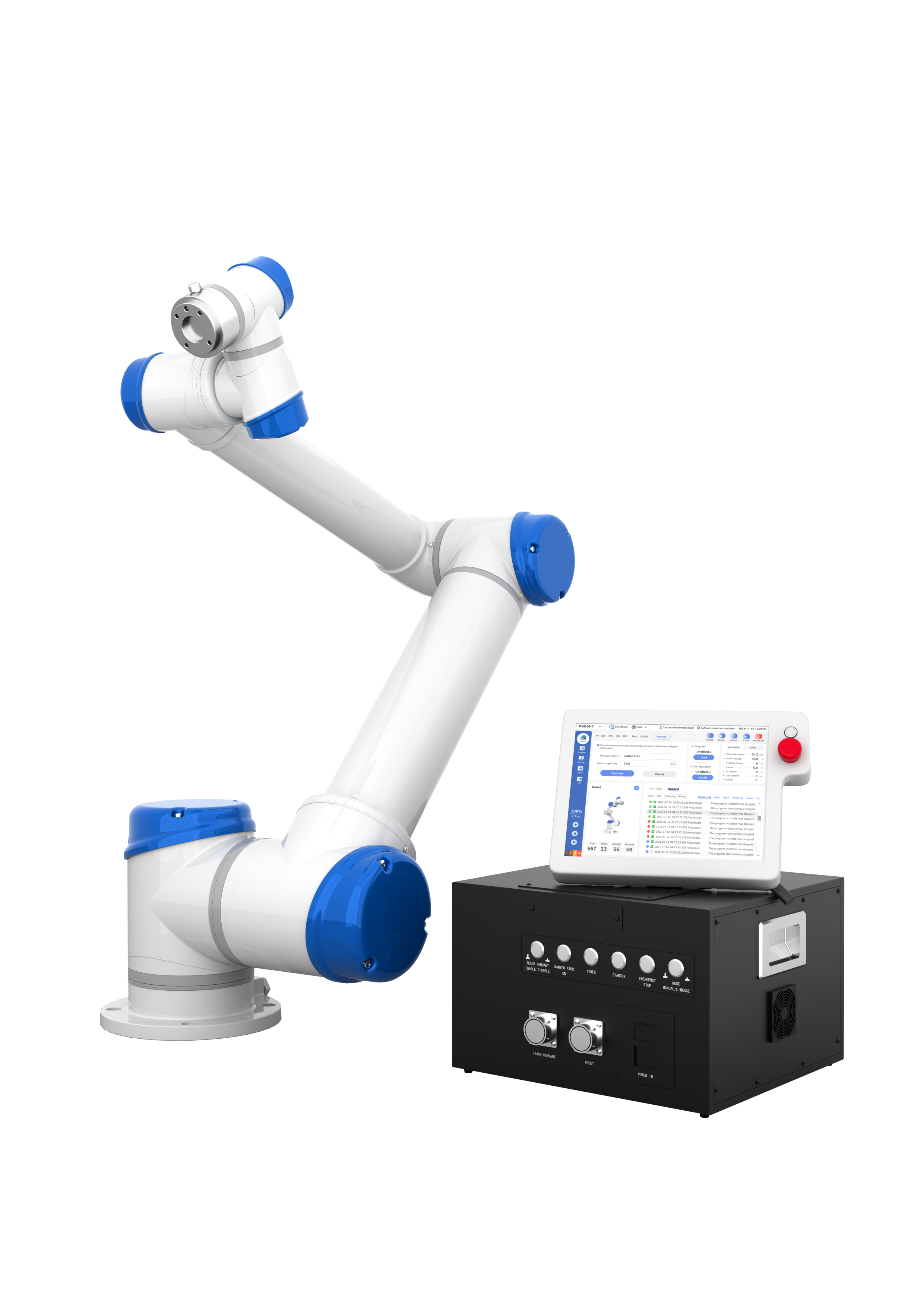
Простое программирование: операционный терминал с экраном 12,5 дюйма; освоение метода программирования занимает полчаса, а выполнение простого программирования — один час.
Обучение методом перетаскивания: интуитивно понятно и удобно, быстрое нахождение
Расширенный пакет сварочных процессов и несколько типов колебаний: хорошая взаимосвязь и взаимодействие со сварочными аппаратами, а также безупречный внешний вид сварных швов.
Открытая системная платформа: поддерживает несколько методов связи, способна устанавливать связь с различными конечными устройствами, лазерным отслеживанием и другим периферийным оборудованием, удобна для развертывания в различных рабочих условиях и средах.
Высокочувствительный ответ: поддержка 10-уровневого обнаружения столкновений и реализация безошибочного взаимодействия человека и машины
Значительно улучшенная производительность: точность повторного позиционирования может достигать ±0,02 мм; может непрерывно выполнять задачи, требующие высокой точности, в течение длительного времени.
15 минут на монтаж: небольшой размер, легкий вес и возможность перемещения
Уровень защиты IP54: адаптация к суровым условиям окружающей среды


ОНЛАЙН СООБЩЕНИЕ
СОПУТСТВУЮЩИЕ ТОВАРЫ